当前位置:课程学习>>第四章 栅格数据模型>>电子教案>>知识点七
知识点七:栅格数据的压缩和编码
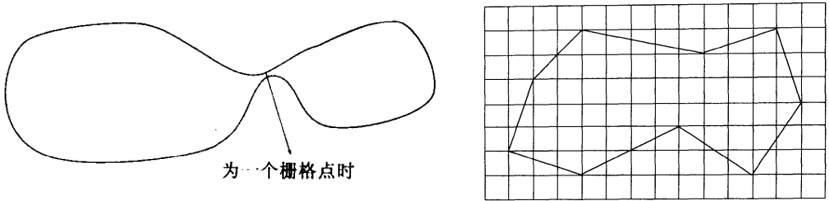
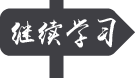
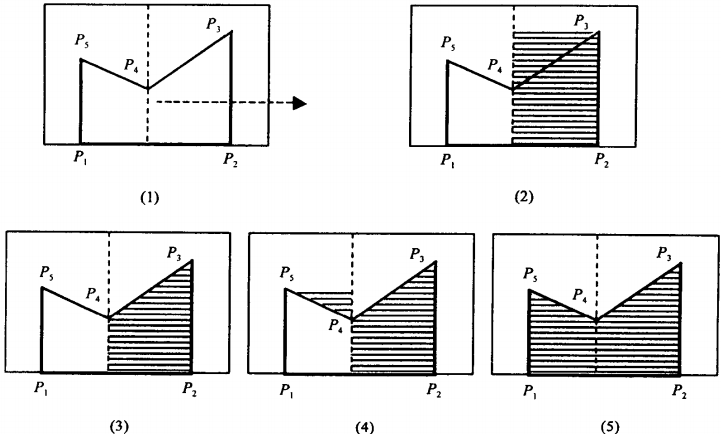
图4-17 种子点法扩散的瓶颈 图4-18 扫描法填充示意
4.19 栅格法填充示意
7.2 栅格—矢量转换
栅格数据到矢量数据转换的一般过程可描述为如下过程。
一、 二值化
由于扫描后的图像是以不同灰度级存储的,为了进行栅格数据矢量化的转换,需压缩为两级(0和1),这就称为二值化。
二值化的关键是在灰度级的最大值和最小值之间选取一个阈值,当灰度级小于阈值时取值为0,当灰度级大于阈值时取值1。阈值可根据经验进行人工设定,虽然人工设定的值往往不是最佳阈值,但在扫描图比较清晰时是行之有效的。当扫描图不清晰时,需由灰度级直方图来确定阈值,其方法为:
设M为灰度级数,Pk为第k级的灰度的概率,nk为某一灰度级的出现次数,n为像元总数,则有:
Pk = nk / n k=1,2,…,M
对于地图,通常在灰度级直方图上出现两个峰值(见图4-20),这时,取波谷处的灰度级为阈值,二值化的效果较好。
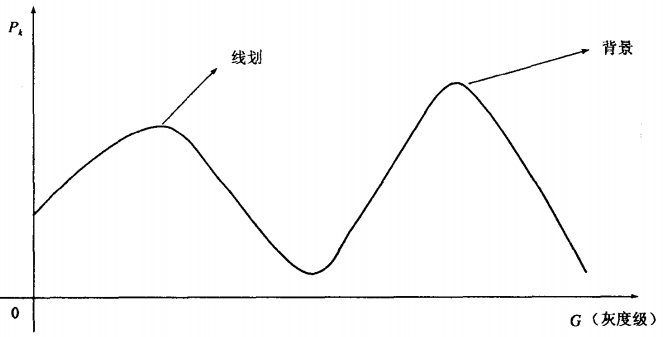
图4-20 灰度直方图上选取阈值
7.1 矢量—栅格转换
二、二值图像的预处理
对于扫描输入的图幅,由于原稿不干净等原因。总是会出现一些飞白、污点、线划边缘凹凸不平等现象。对此,除了依靠图像编辑功能进行人机交互处理外,还可以通过一些算法来进行处理。
例如,用3×3的像素矩阵,规定各种情况的处理原则,图4-21是两个简单的例子。其中“×”表示任何像素值。
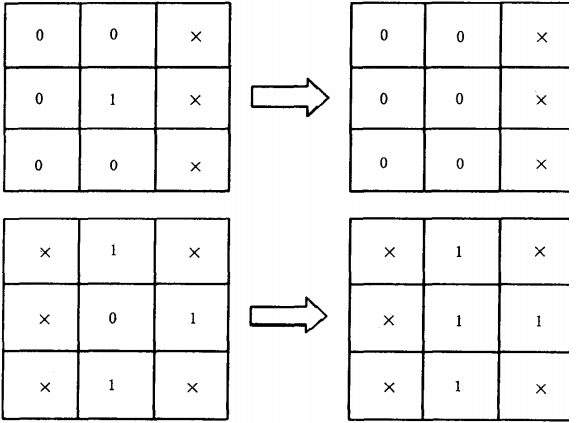
图4-21 去污及填齐模板示意
除了上述方法外,还可用其他许多方法。例如,对于飞白和污点,给定其最小尺寸,不足的消除;对于断线,采取先加粗后减细的方法进行断线相连;用低通滤波进行破碎地物的合并,用高通滤波提取区域范围等。
三、细化 所谓细化就是将二值图像像元阵列逐步剥除轮廓边缘的点,使之成为线划宽度只有一个像元的骨架图形。细化后的图形骨架既保留了原图形的绝大部分特征,又便于下一步的跟踪处理。 细化的基本过程是:
(1)确定需细化的像元集合;
(2)移去不是骨架的像元;
(3)重复(1)(2),直到仅剩骨架像元。
进入下一页